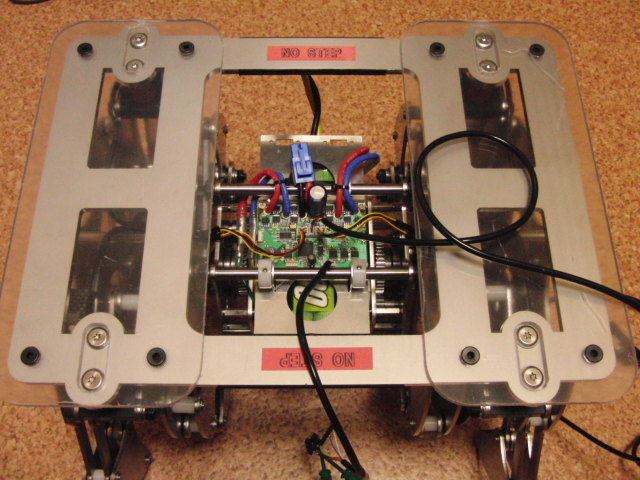
エンコーダ取り付け構造を追加したモータ保持プレートが納品された
ので早速エンコーダーを取り付け。
バラしたついでに配線関係で気になっていたところもついでに修正。
天板には小型のディスプレイとジョグスイッチ、スピーカーを取り付ける
予定なのでまだ外したまま。
小型ディスプレイの納品は14日くらいになりそう。
スピーカー駆動周りの部品がたりてないので、メイン基板の部品と一緒に
この週末中に発注予定。これは発注すれば2日で届くので問題なし。
あと、ディスプレイ固定用のアクリル板も発注しなければならないけど、
寸法サイスがわからないところがあるのでディスプレイ納品後・・・かな。
ではでは。
2010/09/11(土) 02:16:40 | LC eXtreme 進捗
| コメント:0
速度制御+電流制御を試してみて、かなり動き出しのガッツン加速が解消された
ものの、極低速での速度の安定性にはやはり問題があった。
検出できるのが駆動軸の1/42回転と低分解能であることと、回転方向が検出できない
ためこれはある程度見越していたが、実際に乗ってみると妥協できるレベルにはない。
仕方が無いので、エンコーダーをなんとか付ける方法を考えた。
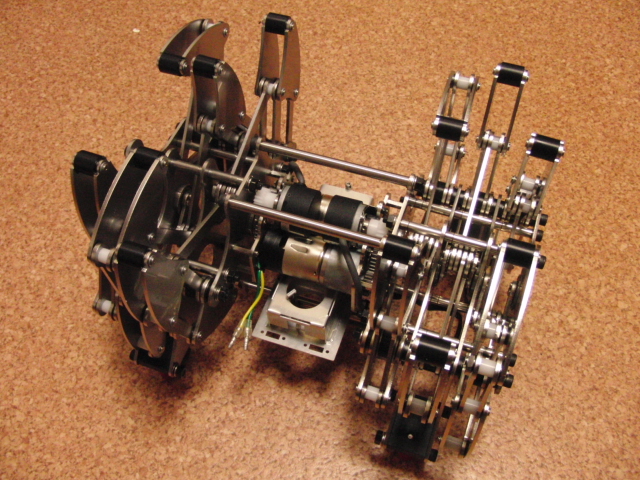
もともと、最初の設計ではエンコーダーを取り付けることを想定して、駆動軸の内側に
スペースを開けていたのだが、ベルト駆動からギア駆動に変えた際にこのスペースが
ふさがってしまい、φ9以下のエンコーダーしかこの部分には入らない。
世の中にはこのザイズのエンコーダーもあるにはあるのだが、@5万円くらいする
らしいので、エンコーダー付きの高級モーターに変えたほうがメリットが大きい
ため却下。既に予定の予算の2倍を軽く使ってしまっているので、さらにこれに
10万円規模の投資をする気にもなれないし・・・
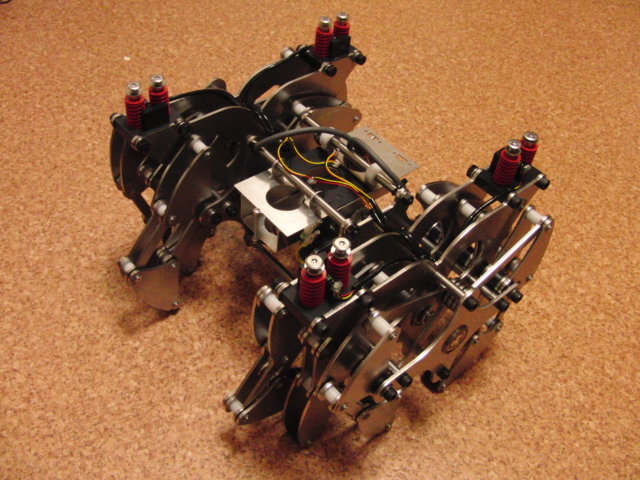
で、かなり前に特売を見かけてなんとなく買ってみたφ38のエンコーダーを
持っていたことを思い出した。これが丁度、サブバッテリを載せようと思っていた
モーター下のスペースに入る。ここで、ギアを介して出力軸と連結すれば、
約1万分の一回転まで検出可能になる。
エンコーダーを保持するためのプレートを設計発注。9日頃納品予定。
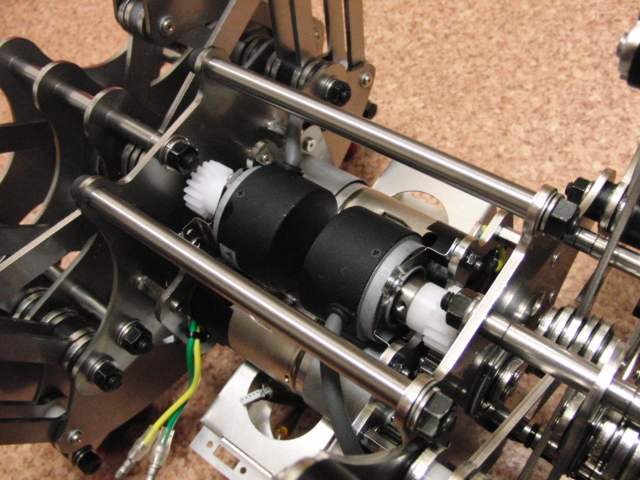
エンコーダーはφ8のホロウ(中空)軸のため、φ8の平行ピンを軸替わりに
使うことにして、モジュール1のPOMでφ8のギアを購入してエンコーダーに
連結まで完了。
あとは、エンコーダーの電気的入力だが、SH2/7125には2chのエンコーダーの
位相計測機能があるので、それを使って問題なく回転計測ができることは確認。
しかし、信号ピンを基板上で他に割り当ててしまっていて、すべての機能の都合を
付けるには少々リワーク箇所が多くて振動の多い組み込み状態での信頼性が
怪しいので、基板をつくり直すことに決定。
今回は面積比約半分で4層基板でレイアウト。今日発注して16日に出荷の見通し。
あと、実機での動作確認に常にPCとUSBシリアル接続して確認するのが邪魔くさく
なってきたので、本体上に各種ステータスをグラフィカルに表示したり、本体で調整
を完結させるために、小型のカラーディスプレイを搭載することにした。
これも発注済みなので、まぁそのうち届くだろう。
かなり仕様はリッチになってきて、完成が楽しみなのだが、あいにく今月後半は
いろいろ忙しくほとんど家を空けることになりそうなので、本格的な調整開発は
10月以降になりそう。
ではでは。
2010/09/06(月) 23:39:12 | LC eXtreme 進捗
| コメント:0
フォトリフレクタを使ってギアの歯面の反射を検出する方法は、
ギアの汚れによって検出がバラつくことは想定していたが、
予想以上に問題が酷い。
そこで、磁気式センサに変更した。
いままで磁気式のセンサは一度も使ったことがなかったので、もっと苦労する
かと思ったけれど、センサの素性がいいのでセンサ以外は手持ちの部品で
揃えて動かすことができた。センサは、ギアドモーターの出力軸につけた
ドライブギアの手前側のスペーサにタイラップで固定。
SUSの追加工は大変だしばらすのはメンドくさいので。
基板をぴっちり合わせて切り出しているので、これで全く動かないので
問題なし。
来週からは、電流制御+速度制御の実装と実機騎乗での調整作業の予定。
ではでは。
2010/08/23(月) 02:04:21 | LC eXtreme 進捗
| コメント:0
先月は海でリフレッシュしたので今度は山と川でリフレッシュしてきた。
気分も新たに、電流制御周りのデバッグなどをちょこちょこ作業。
いろいろあったが、電流制御 他、回路周りの動作確認ができたので、実機に組み込んで
動作確認をしてみた。
[高画質で再生] Land Crawler eXtremeの動作確認 そういうわけで、1ヶ月半ぶりに稼動状態になった。
久しぶりに動かしてみると、どっすんどっすんウルサくてちょっと家で動かすもんじゃ
ないなと再確認。夜は絶対動かせない、これは。
で、前よりも細かく制御できるとはいえ、乗ってみるとやはり動き出しのガッツンで
振り落とされやすい。。。これはちょっといただけないので、電流制御に+速度制御
も加えることにする。
とりあえず、速度検出用のセンサ回路をちゃちゃっと作って、ソフト的に速度検出まで
できることを確認した。問題は、センサの取り付け場所と取り付け方法。
ボディが基本的にSUSなので、穴をあけるとなると大仕事。。。
あと、速度検出のソフト修正をしていたら、電流制御周りにバグが混入したらしく、
過電流リセットが発生。めんどくさー
ではでは。
2010/08/18(水) 23:39:19 | LC eXtreme 進捗
| コメント:0
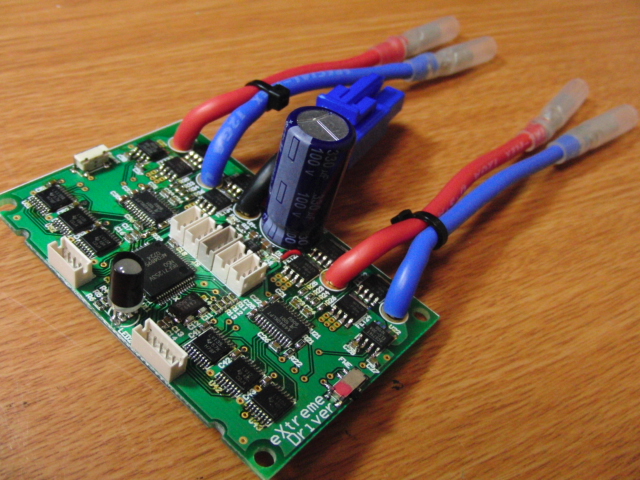
いろいろ(というか仕事が)忙しくて思うように作業をする時間が取れずに
遅くなってしまったが、やっと eXtreme Driver でのモーター駆動
を確認できた。
電流フィードバックはとりあえず20kHzで回して、ステートマシンのループは100Hz。
CPUの占有率は今のところ50%くらい。
まだ電流フィードバックは(実装だけで)試してないのでこれからいろいろテスト。
裏面のジャンパ切替で、オンオフ制御、ローサイドスイッチ、オンブレーキ制御の3つを
ロジックで切替えられるようにしてある。とりあえず今のところは何も考えずに無難に
オンオフ制御。この辺も電流制御とあわせて、どれを使うか検討する予定。
ではでは。
2010/08/12(木) 01:06:27 | LC eXtreme 進捗
| コメント:0