※2016年4月~のbCore Ver. 1.10に関する説明になります。こちら を参照して下さい。 bCoreってなに? 汎用多目的超小型BLEリモコンロボットコアユニットが bCore です。
技適対応のBLEモジュール(
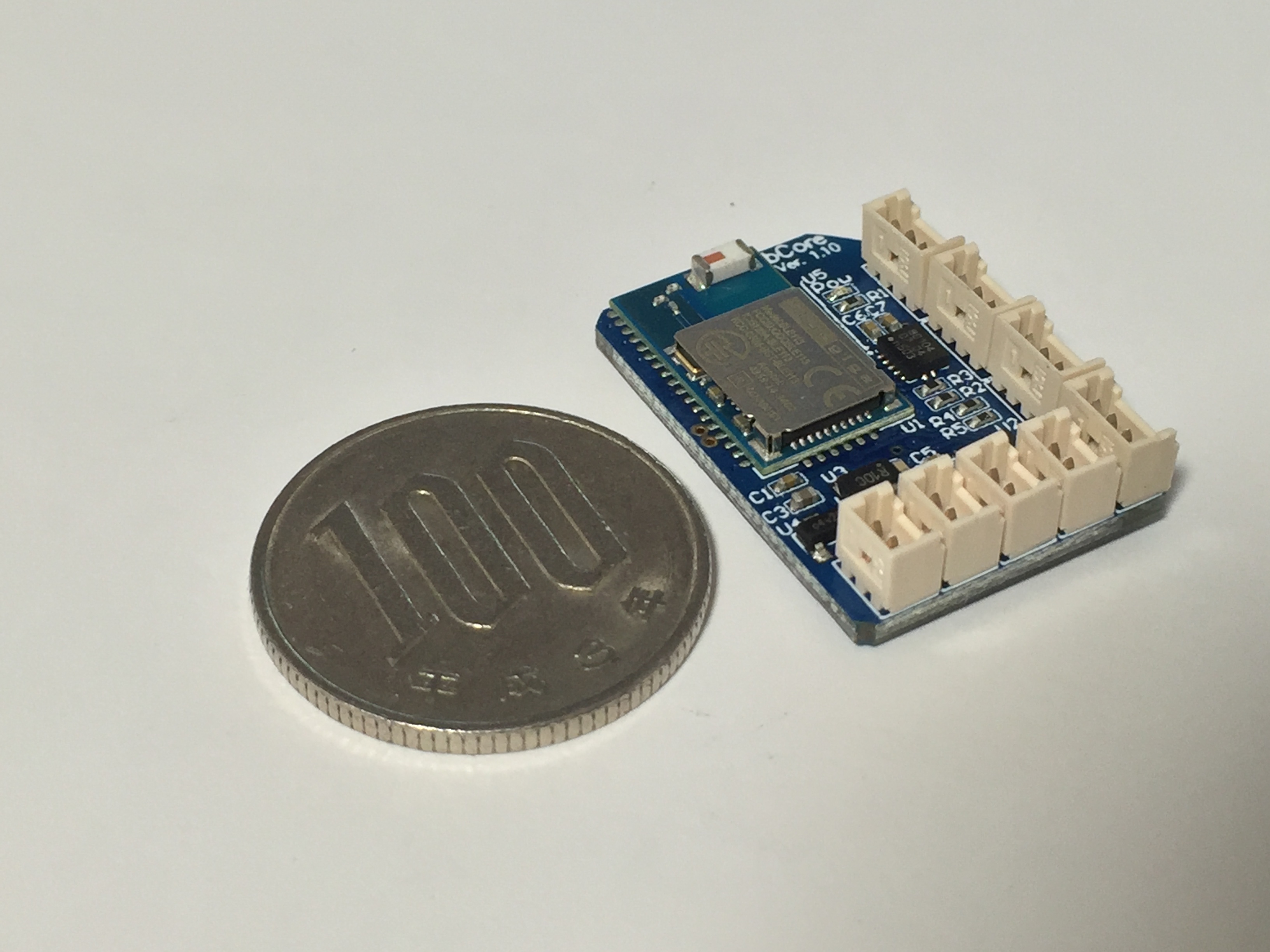
BLE113 )と周辺回路を組み込んだ超小型基板にファームウェアを焼きこんだ bCore と、iOS上で動くアプリケーションソフト
bDriver を用いることで、誰もが簡単にiPhoneなどからコントロールできる超小型ロボットを製作できることを目的としています。
Android端末からは
bCore Dirver for Android 、Windows10PCもしくはWindows10 Mobile端末からは
bCore Driver (開発・提供 @shohaga様)で操作可能です。
ファームは既に焼かれているので、ユーザーはラジコンサーボとモーターと電池をbCoreに繋ぎ、スチロール素材や木材、3Dプリンタなど、好みの方法でロボットのガワを制作するだけで自由に自分のロボットを開発できます。
技適、FCC、CE対応のBLEモジュールを使用しているため、日本、アメリカ、EU各国での使用が可能です。
bCoreで何ができるの? ・4つのラジコンサーボをiPhoneなどから操作することで、ロボットの関節をコントロール
・2つのモーターの速度を疑似的にiPhoneなどから操作することで、ロボットの車輪をコントロール
・1つのポートのオン/オフをiPhoneなどから操作することで、ロボットに取り付けたLEDの点灯/消灯をコントロール
・ロボットの電池電圧をiPhoneなどから確認
⇒
bCoreを使った作成事例集 (Ver.1.00事例を含みます。)
VIDEO bCore Ver.1.10 と Ver.1.00 との違い ・bCore Ver.1.10では、レギュレーターが昇圧/降圧自動切り替えタイプのものに変更され、
内部動作電圧が2.1Vから3.3Vに変更されています。
これにより、供給電源電圧が1.8Vから動作が可能になり、ニッケル水素電池2本での
動作も可能になりました。(接続されるサーボの動作は各サーボの動作電圧に依ります。)
加えて、負荷がかかり電源電圧が低下した場合にリセットがかかりにくくなりました。
また、Ver.1.00では点灯できなかったVfの大きな青や白色のLEDの点灯も可能になりました。
・背面でパターンカット+ジャンパー処理を行うことで、DCモーター駆動のHブリッジドライバ2つを
並列動作(ブーストモード)させ、1ch 3.0AまでのDCモーター駆動が可能になりました。
bCoreはどこで買えるの? 株式会社スイッチサイエンスの販売サイトで販売 しております。
bCore Ver. 1.10の仕様 外形サイズ:27.0mm x 18.6mm x 6.3mm(コネクタ部)
電源入力電圧:1.8V~5.5V
内部ロジック電圧:3.3V
PortOut:1ch
ラジコンサーボ:4ch
DCモーター:2ch
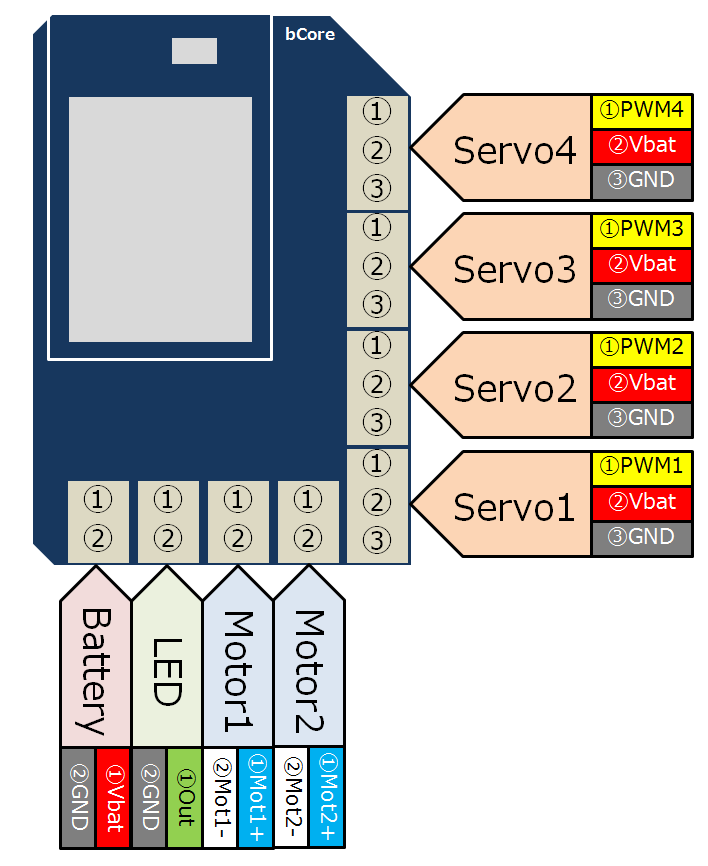
bCoreのコネクタ配置とピン配置 CON1:電源
①電源+入力(1.8~5.5V)
②電源-入力(GND)
CON2:出力ポートch1
①出力ポートch0(H:3.3V/L:0.0V)
②GND
CON3:モーターch1
①モーターch1+
②モーターch1 -
CON4:モーターch2
①モーターch2+
②モーターch2 -
CON5:ラジコンサーボch01
①制御信号線(H:供給電源レベル/L:0.0V)
②電源+(供給電源)
③GND
CON6:ラジコンサーボch2
①制御信号線(H:供給電源レベル/L:0.0V)
②電源+(供給電源)
③GND
CON7:ラジコンサーボch3
①制御信号線(H:供給電源レベル/L:0.0V)
②電源+(供給電源)
③GND
CON8:ラジコンサーボch4
①制御信号線(H:供給電源レベル/L:0.0V)
②電源+(供給電源)
③GND
bCoreをiOSデバイスから操作するアプリ bDriver App Storeで bDriver をダウンロード(無料)すると、iOSデバイス(iPhone, iPod touch, iPadなど)からbCoreをコントロールできます。
詳しくは
⇒bDriverとは? を参照のこと。
Android端末からについては
bCore Dirver for Android 、Windows10PCもしくはWindows10 Mobile端末からについては
bCore Driver (開発・提供 @shohaga様)を参照してください。
iOSからbCoreモジュールを操作するホストアプリケーションのサンプルコードは
こちら で公開しています。
bCoreの起動と接続時/非接続時の状態について bCoreモジュールは、電源投入後約0.5秒でファームウェアが起動します。
正常に起動した場合、待機モードとなりモジュール上のLED(赤)が毎秒1回点滅をします。この状態では、出力ポートはLレベル固定、ラジコンサーボは原点位置ホールド、モーターは停止状態になります。
bDriverなど、BLEセントラルデバイスから接続された場合、モジュール上のLED(赤)は高速に点滅します。この状態では、出力ポート、ラジコンサーボ、モーターの各機能はBLEセントラルデバイスからの指示に従って制御されます。通信が遮断した場合、待機モードに強制的に復帰します。
bCoreの電源 bCoreの電源接続コネクタは、1.25mmピッチの2ピンコネクタ(
Molex Pico Blade )で、入力可能な最大電圧は5.5Vとなっています。
アルカリ乾電池3本直列(4.5V)、LiPo電池1セル(3.6V)、LiFe電池1セル直列(3.3V)、カメラ用リチウム電池1本(3.0V)、ニッケル水素電池2本直列(2.4V)などが利用できます。ラジコンサーボやモーター駆動をするため、ある程度電流放出能力のある電池が必要になります。そのためボタン電池は使うことはできません。
なお、ラジコンサーボやモーターを繋がない場合は1.8V程度の電源からの使用が可能です。
bCoreに接続可能なラジコンサーボ bCoreのラジコンサーボ接続コネクタは、1.25mmピッチの3ピンコネクタ(
Molex Pico Blade )です。
ホビーキング製ラジコンサーボ
HK-282A Ultra-Micro Servo 2g / 0.2kg / 0.08sec HK-5330 Ultra-Micro Digital Servo 1.9g / 0.04sec / 0.17kg HK15318B Low Voltage Micro Servo 2.2g/11kg/.08sec などが、3V前後の電源電圧で動作し直接コネクタ接続できます。
一般的な2.54mmピッチのラジコンサーボは、
変換コネクタ を使うことで接続可能となります。ただし、一般的なラジコンサーボの場合は電源電圧が5V程度必要なため接続する電源に注意が必要です。5.5Vを超える電源電圧を必要とするラジコンサーボは使用することができません。
※HK-282Aは電源ノイズに敏感で、接続されるDCモーターによってはブラシで発生する電源ノイズで動作が不安定になることがあります。具体的には、RE-130RA/RE-140RA(適正電圧1.5V)を、アルカリ電池3本直列(4.5V)やリチウム電池C123A1本(3.0V)で使用した場合などです。RE-260RA(適正電圧3.0V)では問題なく動作します。HK-5330、HK-15318Bではこの問題は起こりませんが、低電圧仕様のコアドモータを使用する場合はサーボの選定に注意が必要です。
※2016年3月にHobbyKingで新規取り扱い開始した、HK-282AS, HK-5320S, HK-5330S, HK-15318Sは、コネクタが1.0mmピッチのJST SHコネクタに変更されているためbCoreに直接繋いで使用することができませんのでご注意下さい。2016/05/02時点でHobbyKingの商品説明サイトにコネクタの仕様に関する記載はありませんが、購入して確認済みです。bCoreに直接接続可能なコネクタはMolex製1.25mmピッチの3ピンコネクタです。HobbyKingのサイト上では JST 1.25mm Pitch と誤記されていますが、JST(日本航空電子)には1.25mmピッチのコネクタはありません。(2016/05/02追記) bCoreに接続可能なモーター bCoreのモーター接続コネクタは、1.25mmピッチの2ピンコネクタ(
Molex Pico Blade )です。コネクタの許容電流は1.0Aとなっています。bCoreに使用されているモータードライバは
TI製のDRV8835 で、1.5Aまでの電流駆動を許容しています。そのため、マブチモーターなどの小型DCモーターが使用できます。工作用で一般的なマブチモータ(RE-130RA/RE-140A/RE-260RA/RE-280RA)は、定格電圧範囲が1.5~3.0VとbCoreの電源電圧推奨範囲に比べて低くなっており使用には注意が必要です。ミニ四駆に使用される、ハイパーダッシュモーターなどは電流の許容範囲を大幅に超えるため絶対に使用しないでください。
なお、モーター電流が1.5Aを超えるとモータードライバ側で保護機能が働き短時間モーター電流がカットされます。
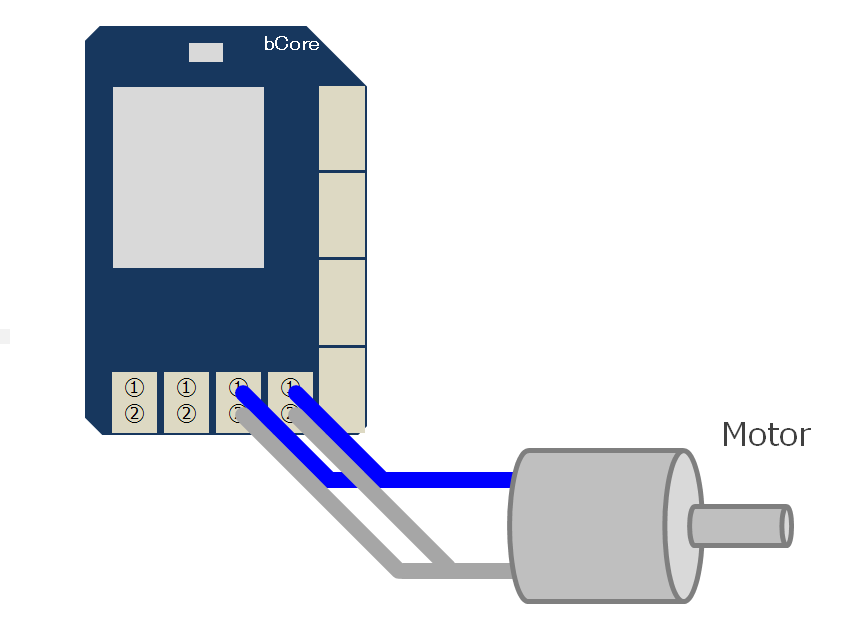
ブーストモードの使用方法 bCoreに使用されているモータードライバは
TI製のDRV8835 で、2つのモーター駆動回路それぞれ独立に1.5Aまでの電流駆動を許容しています。
この駆動回路を並列動作させることで、1つのモーターで3.0Aまでの電流駆動を許容させるモードがブーストモードです。
ブーストモードを利用するには、
①モジュール背面の切替パターンを確認する
②Normal側のパターン2箇所をカットする
③Boost側のパターン2箇所を0Ω抵抗や導電体などを用いてショートさせる
処理が必要です。
ブーストモードでは、2つあるモーターのうちMot2のみがアプリケーションから操作可能になります。
モーターとの電気的接続は、2つあるモーター接続コネクタの+と-のピン両方をモーターの同じ端子に接続して下さい。
ブーストモードからノーマルモードに再度戻したい場合、
①Boost側のパターン2箇所のショートを解除する
②Normal側のパターン2箇所を0Ω抵抗や導電体などを用いてショートさせる
処理が必要になります。
bCoreに接続可能なLED bCoreのポート出力接続コネクタは、1.25mmピッチの2ピンコネクタ(
Molex Pico Blade )です。bCore Ver. 1.10の内部ロジック電源はVcc=3.3Vとなっており、ポート出力の電圧レベルも、3.3V(On)/0.0V(Off)となります。
また、ポートの許容電流は20mAとなっています。 また、ポートの許容電流は4mAとなっています。(2016/05/12訂正) bCoreのロゴ Bluetoothロゴを羽根と触角に、Coreの頭文字の"c"を隊幹部に見立てた 青い蜂 ルリモンハナバチ がモチーフになっています。
ルリモンハナバチは、珍しい青い蜂で、自身では巣を作らず、他の蜂の巣に労働寄生するという特徴をもっています。
bCoreのシステムも、BLEデバイスと、iOSアプリケーションという生態系に寄生することで存在できています。
bCoreの回路図 準備中
bCoreのファームウェアバージョン F1.11 (2016/06/22) サーボ可動範囲拡大 ⇒
詳細、後進方法はこちら F1.10 (2016/04/08) ハードウェアVer. 1.10対応
F1.01 (2015/08/21) マイクロサーボの発振対策
F1.00 (2015/07/25) 初期リリース
※ファームウェアバージョンは、BLEのテストアプリケーション(LightBlueなど)で、Information ServiceのFmware Reision Stringを読み出すことで確認可能です。
bCoreのBLEペリフェラル仕様 ⇒bCoreをBLE端末で認識、操作するための技術情報 bCoreに独自のファームを書き込む方法 ⇒bCoreのファームウェアを独自のものに書き換える方法
2016/04/08(金) 16:38:22 | bCoreとは?
| コメント:2
> サーボコントロールバーをセルフセンタリングに変更することは可能ですか?
お返事が遅くなり申し訳ありません。
アプリケーションを自作すれば可能です。
また、次期アプリではセルフセンタリング機能のオンオフを追加する予定です。
2017/10/21(土) 19:20:03 |
URL |
Takashi Yamamoto #-
[ 編集 ]


 汎用多目的超小型BLEリモコンロボットコアユニットが bCore です。
汎用多目的超小型BLEリモコンロボットコアユニットが bCore です。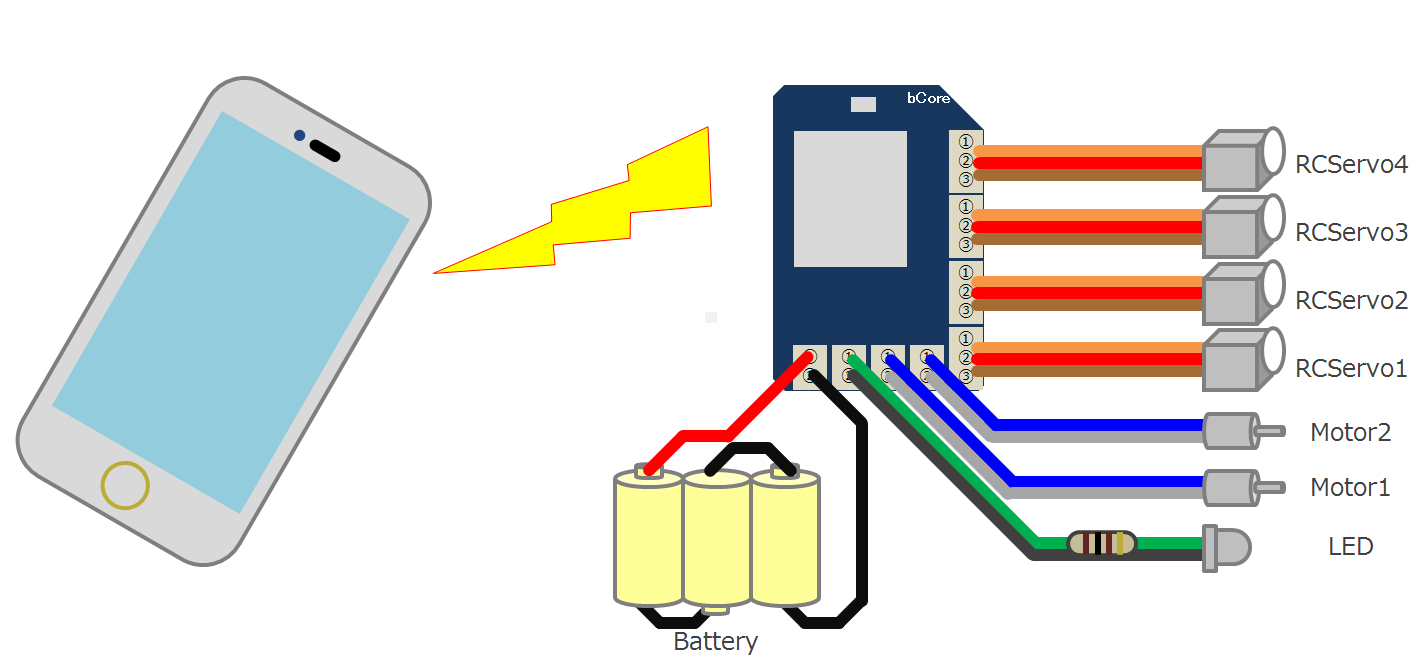

 ブーストモードでは、2つあるモーターのうちMot2のみがアプリケーションから操作可能になります。
ブーストモードでは、2つあるモーターのうちMot2のみがアプリケーションから操作可能になります。